Badanie roli LiDAR w autonomicznych robotach mobilnych (AMR)
- udział
- Wydawca
- Zoe
- opublikowany
- 2024/9/4
streszczenie
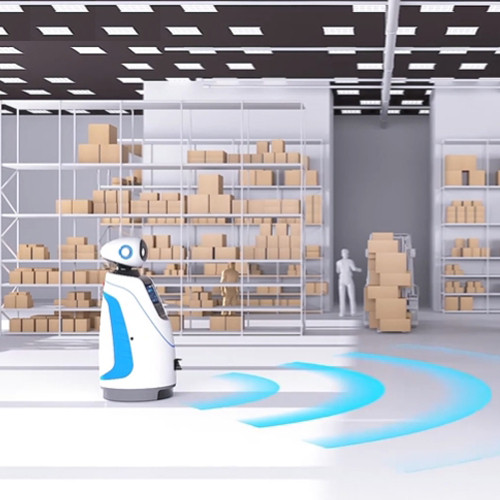
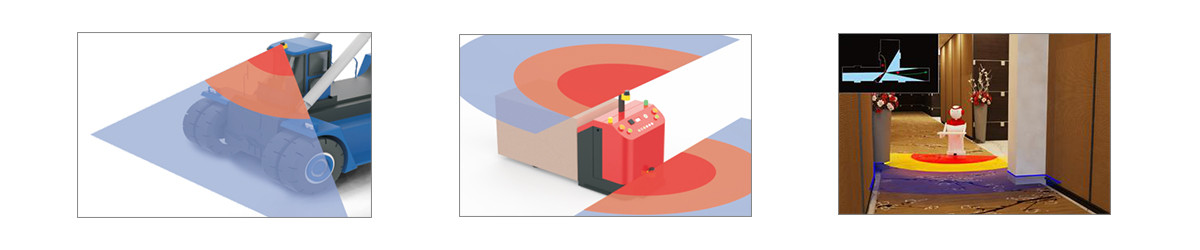
Roboty AMR znacznie zwiększyły wydajność produkcji i inteligencję zarządzania logistyką w automatyce przemysłowej i inteligentnej logistyce dzięki autonomicznej nawigacji i elastycznej mobilności. Jako jeden z głównych komponentów robotów AMR, LiDAR służy jako „oczy” robota. LiDAR nie tylko umożliwia precyzyjne pozycjonowanie i nawigację, ale także zapewnia wykrywanie i identyfikację przeszkód w czasie rzeczywistym, zapewniając niezawodne bezpieczeństwo w zakresie unikania przeszkód przez roboty
Czym jest technologia 2D TOF LiDAR i jak działa w robotach AMR?
LiDAR 2D TOF
2D TOF LiDAR (Two-Dimensional Time of Flight LiDAR) to system radaru laserowego oparty na zasadzie Time of Flight (TOF), używany do dwuwymiarowych pomiarów przestrzennych. Działa poprzez emitowanie wiązki laserowej w kierunku celu i mierzenie czasu potrzebnego na emisję lasera, odbicie od celu i powrót (tj. czas lotu), aby dokładnie obliczyć odległość między celem a LiDAR-em. Odbity sygnał, po przetworzeniu, dostarcza informacji o odległości celu. Poprzez włączenie mechanizmu skanowania LiDAR-a (takiego jak obracające się lustro lub skanowanie liniowe), system może dodatkowo określić położenie celu (tj. azymut) w płaszczyźnie dwuwymiarowej.
Autonomiczne roboty mobilne (AMR)
Kiedy mowa o AMR, ludzie często myślą o innym pokrewnym koncepcie — AGV.
AGV, co oznacza „Automated Guided Vehicle”, to typ pojazdu, który może automatycznie poruszać się po zdefiniowanej ścieżce, zwykle używanej do wspomagania transportu obiektów. AGV podążają ustaloną ścieżką, a jeśli napotkają przeszkodę podczas ruchu, zatrzymają się i zaczekają, aż przeszkoda zostanie usunięta, zanim pojadą dalej ustaloną ścieżką, aby dokończyć zadanie transportowe.
AMR, co oznacza „Autonomous Mobile Robot”, osiąga ruch bez śladu dzięki autonomicznej nawigacji i często może być wyposażony w ramiona robotyczne w celu zwiększenia możliwości obsługi obiektów. AMR-y mogą porównywać swoją bieżącą ścieżkę ruchu z wcześniej zapisaną mapą w czasie rzeczywistym. Jeśli podczas ruchu pojawi się przeszkoda, system natychmiast przeliczy najlepszą trasę, aby ominąć przeszkodę i dotrzeć do wyznaczonego miejsca.
Typowe metody autonomicznego ruchu dla AMR obejmują nawigację LiDAR (LiDAR SLAM) i nawigację wizualną (Visual SLAM). W tym artykule skupimy się na nawigacji LiDAR dla AMR.
LD-05D 2D TOF LiDAR
LiDAR LD-05D 2D TOF firmy DADISICK ma funkcję samouczenia, która umożliwia użytkownikom ustawienie obszaru roboczego za pomocą oprogramowania „LD Designer”. Po naciśnięciu i przytrzymaniu przycisku „samouczenia” przez 3 sekundy urządzenie przechodzi w tryb samouczenia. W tym trybie LiDAR 2D wykonuje poziome skanowanie laserowe, aby szybko przechwycić informacje o konturach 2D otoczenia otaczającego robota, wykorzystując zeskanowany kontur do zdefiniowania granic obszaru roboczego.
Kluczowe funkcje 2D TOF LiDAR w systemach AMR
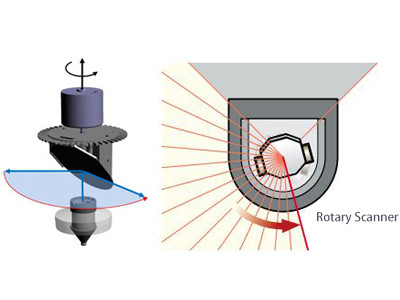
Skanowanie radarowe:
2D LiDAR skanuje płaszczyznę poziomą, emitując wiązki laserowe i odbierając sygnały odbite od otaczających obiektów. Sygnały te służą do pomiaru odległości i kąta (zwykle azymutu) między obiektami a radarem.
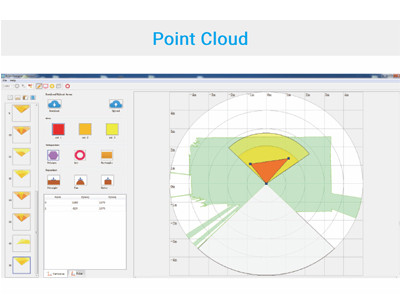
Generowanie chmury punktów:
Podczas procesu skanowania punkty danych zebrane przez radar (odległość i kąt) są konwertowane na chmurę punktów w układzie współrzędnych 2D. Te punkty danych chmury punktów reprezentują pozycje i kształty obiektów w płaszczyźnie skanowania radaru.
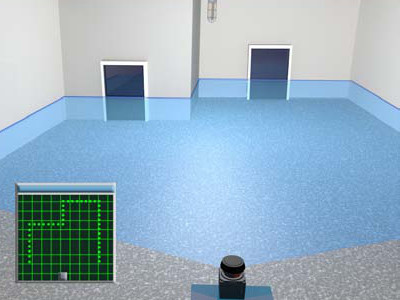
Konstrukcja mapy:
Na podstawie danych chmury punktów można wygenerować mapę 2D środowiska. Mapa ta może mieć formę siatki zajętości, gdzie każda komórka siatki reprezentuje mały obszar środowiska i jest oznaczona jako wolna (nawigowalna), zajęta (przeszkodzona) lub nieznana na podstawie danych radarowych.
Nawigacja autonomiczna
W przypadku robotów AMR wyposażonych w 2D LiDAR zazwyczaj stosuje się algorytmy dostosowane do środowisk 2D, takie jak gmapping, hector, karto i cartographer. Algorytmy te wykorzystują dane dostarczane przez 2D LiDAR do konstruowania map i lokalizacji robotów.
Podczas procesu SLAM AMR wykorzystuje dane środowiskowe przechwycone przez 2D LiDAR, połączone z algorytmami SLAM, aby stopniowo konstruować mapę 2D środowiska pracy. Mapa ta obejmuje nie tylko lokalizację przeszkód, ale może również zawierać ściany, korytarze i inne cechy środowiskowe.
Dzięki początkowej mapie i danym środowiskowym w czasie rzeczywistym AMR może osiągnąć dokładniejszą lokalizację za pomocą algorytmów SLAM. Na podstawie skonstruowanej mapy AMR może wykonać planowanie ścieżki, wybierając optymalną trasę, aby ominąć przeszkody i dotrzeć do docelowej lokalizacji.
Gdy zajdą zmiany środowiskowe (takie jak pojawienie się nowych przeszkód lub zablokowanie ścieżek), AMR użyje danych 2D LiDAR i algorytmów SLAM do aktualizacji mapy i ponownego zaplanowania trasy. Dzięki temu dynamicznemu mechanizmowi adaptacji AMR utrzymuje ciągłą i stabilną autonomiczną nawigację.
Rozważania:
Ponieważ 2D LiDAR skanuje tylko w płaszczyźnie poziomej, nie może dostarczyć informacji o wysokości przeszkód, co może ograniczyć możliwości nawigacyjne AMR w niektórych sytuacjach, zwłaszcza gdy wysokość przeszkody znacząco wpływa na przejezdność robota. Jednak w wielu scenariuszach ruchu na płaszczyźnie 2D (takich jak środowiska wewnętrzne i płaskie obszary zewnętrzne) 2D LiDAR jest wystarczający do mapowania i nawigacji.
Integracja 2D TOF LiDAR z innymi czujnikami i przyszłe trendy
LiDAR można również zintegrować z innymi czujnikami, takimi jak kamery i czujniki ultradźwiękowe, aby zwiększyć ogólną wydajność robotów AMR. Na przykład w systemie unikania kolizji robota AMR czujniki ultradźwiękowe mogą uzupełniać LiDAR, poprawiając zdolność robota do wykrywania obiektów o niskiej refleksyjności i dostosowywania się do określonych warunków środowiskowych. Ponadto w scenariuszach wymagających wykrywania z bliskiej odległości, takich jak przerwy między robotem a półkami, czujniki ultradźwiękowe mogą odgrywać kluczową rolę.
Odległość 5 m. Technika polegająca na użyciu wiązki laserowej do pomiaru odległości i tworzenia szczegółowych map obiektów i środowisk.

Zasięg wykrywania 20 m. Technika wykorzystująca wiązkę laserową do pomiaru odległości i tworzenia szczegółowych map obiektów i środowisk.

Zakres detekcji: 30-300 mm, 50-500 mm, 60-1000 mm Materiał: niklowanie miedzią, okucia plastikowe Typ połączenia: złącze M12 5-pinowe

Zakres detekcji: 100-2000 mm, 200-4000 mm, 350-6000 mm Materiał: niklowanie miedzią, okucia plastikowe Typ połączenia: złącze M12 5-pinowe