Znajomość branży | Drobne szczegóły wykorzystania czujnika LiDAR w specjalnych scenariuszach
- udział
- opublikowany
- 2024/5/29
streszczenie
Produkty czujników LiDAR obejmują typ unikania przeszkód, typ nawigacji oraz zintegrowaną nawigację i typ unikania przeszkód; mają zalety wysokiej dokładności pomiaru, dużej prędkości skanowania, silnych zdolności przeciwzakłóceniowych, małych rozmiarów, lekkości i wysokiej niezawodności.
Czujnik LiDAR to technologia zaproponowana po raz pierwszy w latach 60. XX wieku. Dzięki szerokiemu zastosowaniu LiDAR w ciągu ostatnich kilku lat przeżył nową rundę dobrobytu i postępu oraz zastosowania w wielu branżach. Szybko stała się kluczową technologią w obszarach autonomicznej jazdy, inspekcji dronami, automatyce przemysłowej itp.
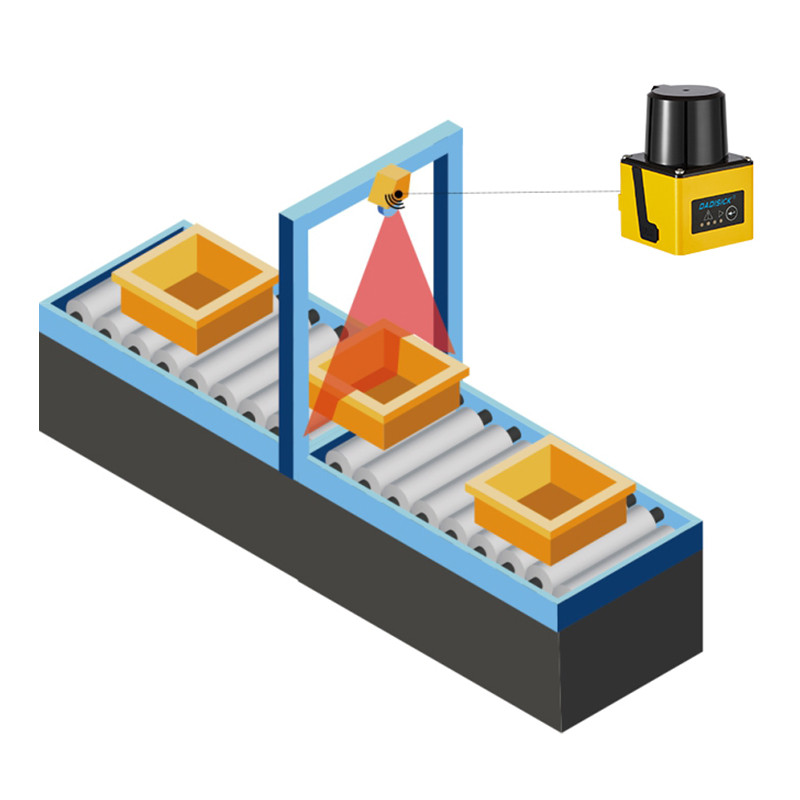
Do tej pory firma DADISICK wprowadziła na rynek kilka produktów z serii czujników LiDAR , obejmujących typy unikania przeszkód, typy nawigacji oraz zintegrowane typy nawigacji i unikania przeszkód; mają zalety wysokiej dokładności pomiaru, dużej prędkości skanowania, silnych właściwości przeciwzakłóceniowych, małych rozmiarów, lekkości i wysokiej niezawodności i są idealnym wyborem dla przemysłowych pojazdów AGV, robotów mobilnych i robotów o niskiej prędkości.
Każdy czujnik ma swój własny, odpowiedni scenariusz zastosowania w oparciu o jego własną charakterystykę działania. W rzeczywistych zastosowaniach w środowisku specjalnym LiDAR ma również kilka wskazówek dotyczących użytkowania.
Zasada działania czujnika LiDAR
Czujnik LiDAR działa w oparciu o zasadę czasu przelotu (TOF); LiDAR emituje impuls laserowy i mierzy czas potrzebny na powrót impulsu po odbiciu się od powierzchni mierzonego celu, który następnie jest przekształcany na dane dotyczące odległości.
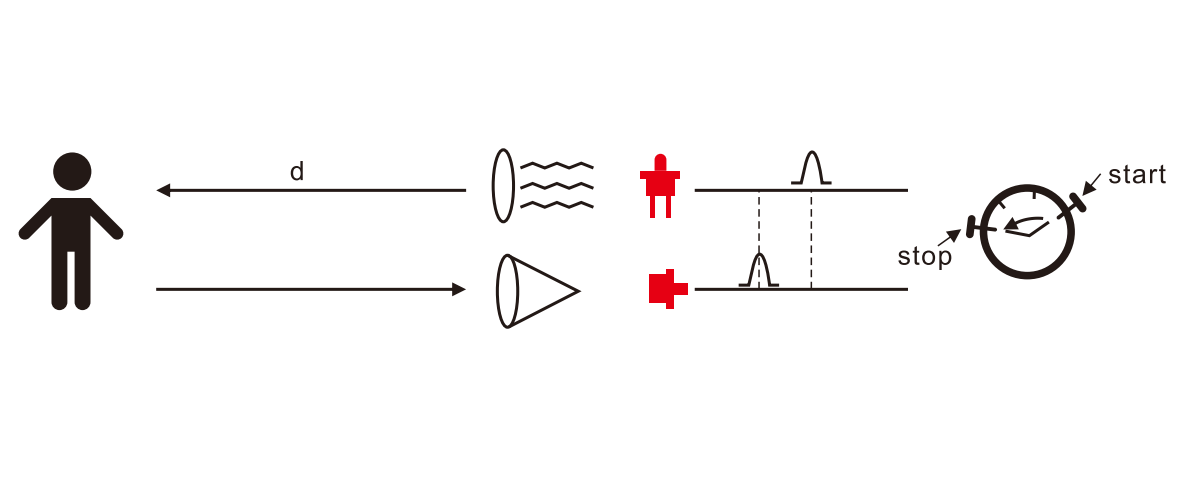
Różnica czasu pomiędzy emitowaniem światła i odbieraniem światła wynosi t
c to prędkość światła, a następnie odległość między radarem a celem
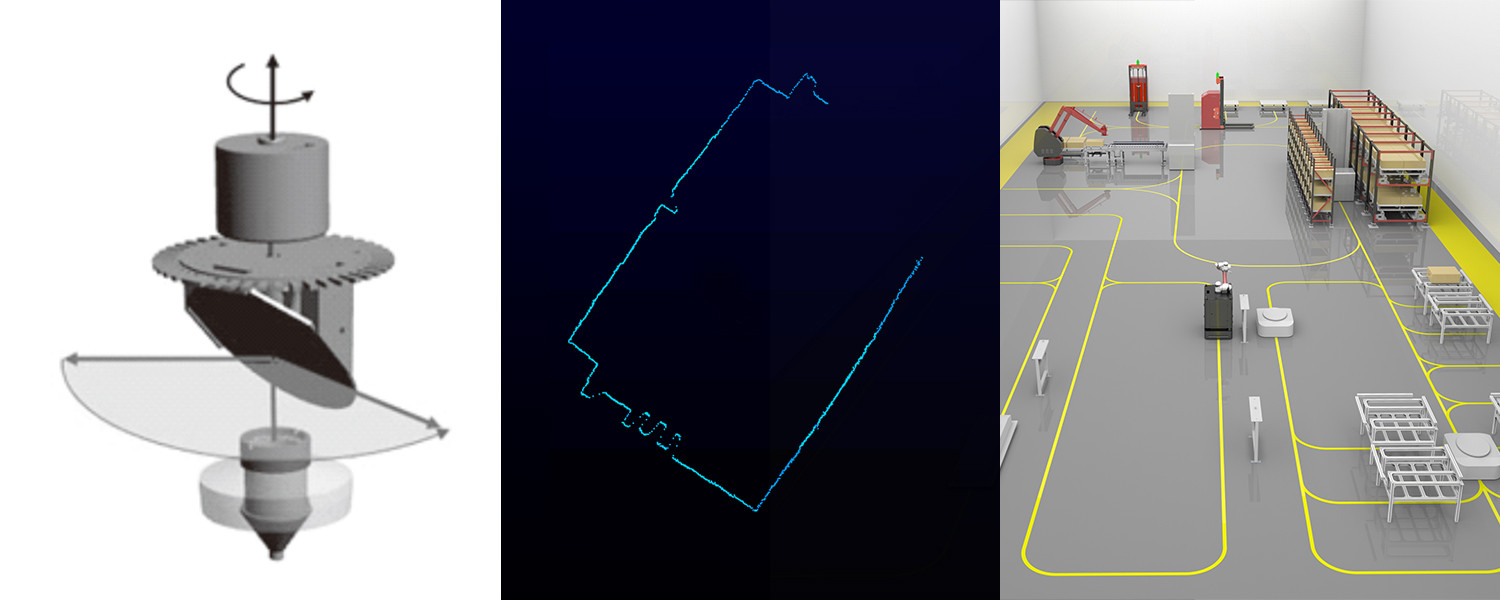
Czujnik LiDAR odbija impuls lasera przez reflektor. Kiedy reflektor jest napędzany silnikiem w celu jego obrotu, tworzona jest płaszczyzna skanowania prostopadła do osi obrotu. Radar emituje światło pulsacyjne w ustalonym czasie, a silnik napędza zwierciadło nadawcze w celu obracania się, dzięki czemu można utworzyć dwuwymiarową chmurę punktów.
Gdy w otaczającym środowisku znajduje się przezroczysty nośnik
Trudność :
Jeśli w otaczającym środowisku znajduje się przezroczysty ośrodek (taki jak czysta woda), można zmierzyć cel wewnątrz lub za przezroczystym ośrodkiem. Ponieważ światło załamuje się w przezroczystym ośrodku, mierzony cel w rzeczywistości znajduje się na załamanej ścieżce światła, podczas gdy wynik pomiaru znajduje się na prostej ścieżce światła, a zmierzona pozycja celu będzie się różnić. Ponadto radar może również odbierać dwa odbite echa, jedno od odbicia rzeczywistej powierzchni celu wewnątrz lub za przezroczystym ośrodkiem, a drugie od rozproszonego odbicia od przezroczystej powierzchni ośrodka, która nie jest całkowicie czysta. W tym momencie wynik pomiaru jest niepewny i może dotyczyć powierzchni medium lub rzeczywistego celu.
Środki zaradcze:
W rzeczywistym użyciu przezroczyste media w otoczeniu, szczególnie te o lustrzanej powierzchni, wymagają specjalnego traktowania, aby uniknąć niestabilnych lub błędnych wyników pomiarów. Konkretną metodą obróbki może być nadanie powierzchni ośrodka rozproszonej półprzezroczystości, zmniejszenie przezroczystości i zdolności odbicia lub osłonięcie tych pozycji podczas przetwarzania danych pomiarowych.
Podczas pomiaru celów lustrzanych

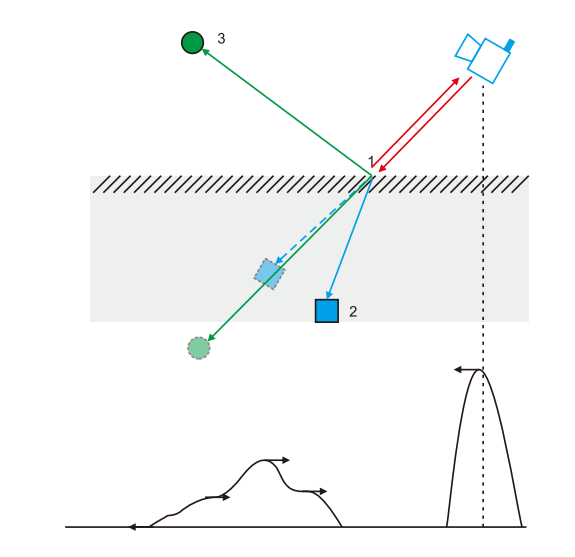
Kiedy radar mierzy cele lustrzane, należy zwrócić uwagę! ! Skuteczny pomiar można osiągnąć tylko wtedy, gdy powierzchnia docelowa jest prostopadła do padającego lasera. Jeśli kąt padania lasera nie jest prostopadły, jego współczynnik odbicia rozproszonego jest bardzo niski, co skutkuje nieskutecznym pomiarem. Rzeczywisty zmierzony wynik to odległość odbicia lustrzanego na ścieżce światła odbicia lustrzanego, jak pokazano na rysunku:
Projekcja radarowa na cel lustrzany powoduje całkowite odbicie, a całkowite światło odbite jest rzutowane na cel. Rzeczywista odległość sprawdzana przez radar to odległość od celu w ramce przerywanej.
Informacje o rzeczywistym zasięgu czujnika LiDAR
Na rzeczywisty zasięg radaru dla konkretnego celu mają wpływ następujące czynniki:
1. Docelowy współczynnik odbicia rozproszonego:
Docelowy współczynnik odbicia rozproszonego jest związany nie tylko z materiałem, ale także z orientacją powierzchni. Im wyższy docelowy współczynnik odbicia rozproszonego, tym większy rzeczywisty zasięg.
2. Obszar odbicia:
Obszar powierzchni docelowej objęty plamką lasera. Im większy obszar pokrycia, tym dłuższa rzeczywista odległość pomiaru.
3. Zabrudzenie klosza przepuszczającego światło:
Zanieczyszczona przepuszczająca światło osłona radaru powoduje zmniejszenie przepuszczalności światła. Im bardziej zmniejsza się przepuszczalność światła, tym gorsza jest zdolność pomiaru. Gdy przepuszczalność światła spadnie do 60%, możliwości pomiarowe mogą być całkowicie nieskuteczne.
4. Warunki atmosferyczne:
Na rzeczywistą zdolność pomiarową radaru wpływają także warunki atmosferyczne, zwłaszcza podczas pracy na zewnątrz. Im gorsza zdolność atmosfery do propagacji światła, tym niższa rzeczywista zdolność pomiarowa radaru. W ekstremalnych warunkach pogodowych (takich jak gęsta mgła) możliwość pomiaru będzie całkowicie nieskuteczna.
Produkty sprzedające się na gorąco
Odległość 5 m. Technika wykorzystująca wiązkę lasera do pomiaru odległości i tworzenia szczegółowych map obiektów i środowisk.

Odległość 20 m. Technika wykorzystująca wiązkę lasera do pomiaru odległości i tworzenia szczegółowych map obiektów i środowisk.

Zasięg wykrywania 20 m. Technika wykorzystująca wiązkę lasera do pomiaru odległości i tworzenia szczegółowych map obiektów i środowisk.

Poprzez konwersję lasera na sygnały elektryczne. określić różne cechy, odległość, przemieszczenie lub położenie.